“In the age of artificial intelligent robots, it’s easy to forget that intelligence alone doesn’t make a machine move efficiently, physics does.“
While everyone talks about Reinforcement Learning, few talk about how mass placement and inertia balancing decide whether your robot glides like Atlas or stumbles like a toddler. Training your model in RL is one thing, since you can even train an asymmetric legged robot to walk, but the question is, would it make sense? No! Designing better and efficient from the root level is what is necessary. Here, I will discuss efficiently packaging/designing mechanical parts that are in motion for robotics applications.
What is Mass Moment of Inertia?
Every engineer knows the golden rule of linear motion
F=m*a,
but when we move into rotational motion, that simplicity fades. Here, the governing law becomes
T=I*α
where F = Force, m = Mass, a = acceleration, T = torque, I = Mass Moment of Inertia & α = angular acceleration.
At first glance, both equations look similar but they are worlds apart in implication.
In linear motion, every extra gram adds a predictable penalty to acceleration. But in rotational motion, the penalty grows quadratically with distance from the axis of rotation since I = m r². So shredding mass will have less effect than placing it close to the pivot as “I” increases with “r²” and shredding mass will bring some structural issue as well.
That means shifting a motor or battery pack just a few centimeters outward from the pivot can make your actuator work exponentially harder. This is why mass placement becomes the unsung hero (or silent killer) of robotic performance.
In humanoid or legged robots, inertia directly governs how naturally and efficiently the robot can move.
A leg swinging forward doesn’t just depend on torque; it depends on how much of its mass lies away from the hip joint. A high inertia in the limb means slower leg motion, sluggish gait correction, and higher power draw.
Similarly, in quadrupeds, an imbalanced mass distribution between the torso and legs leads to instability during gait transitions. You can write a million lines of RL code to compensate but you’ll still be fighting bad physics.
Most roboticists spend days tweaking PID or impedance controllers trying to smooth out motion when the real culprit is often poor mass distribution, not poor control logic.
Here we will have some case studies,
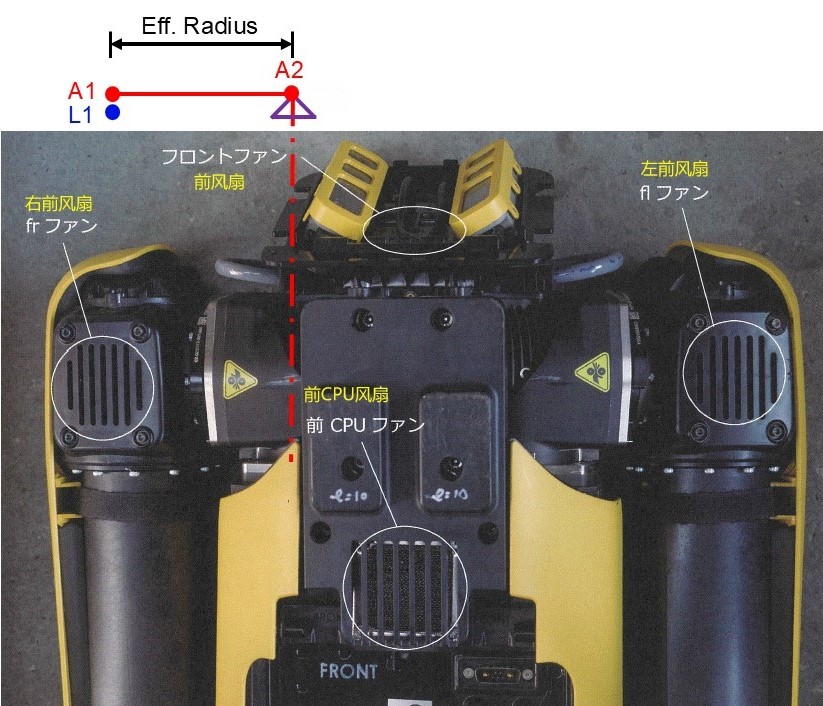
1. xTerra’s SVAN M2
Undoubtly their actuator designs are really good but placing them isn’t.

Where A1 & A2 are actuators, L1 is the leg link. Effective Radius is the distance from the A1 actuator to the pivot.
Most manufacturers try to keep all actuators (A1 and A2) as close as possible to the pivot point and aim to minimize the effective radius. However, certain parameters cannot be modified one of them being L1, the distance from the pivot that is restricted due to robot’s dynamics.
If xTerra had placed A1 beyond A2, making the new packaging layout (from left to right) L1 → A2 → Pivot → A1, it would not only have reduced the overall rotational inertia, but also minimized the stress on the transmission gears due to the static balancing effect. It is also very obvious that xTerra’s solution would be burning more energy in locomotion.
2. Boston’s Spot

It is quite evident that Boston’s engineers have done some serious work in packaging the actuators close to the pivot point. They have positioned actuator A1 and leg link L1 on the same plane and close to the pivot point, while actuator A2 is mounted directly on the pivot itself. This configuration effectively reduces the effective radius, resulting in improved link acceleration, overall system responsiveness and battery energy saving.
3. Agility Robot

Agility Robotics’ team has done some stellar work in designing Cassie, one of the fastest bipedal robots ever built. For them, squeezing every ounce of performance out of the actuators was absolutely critical. But here’s the fascinating part, optimizing actuator performance isn’t just about torque and control; it’s also about reducing the Mass Moment of Inertia.

By lowering inertia around the leg joints, the robot not only moves faster and more responsively but also consumes significantly less energy. This directly translates to longer operational time, that’s precisely why Agility carried forward Cassie’s mechanical configuration into their next-generation robot, Digit, designed for warehouse logistics where energy efficiency is a primary concern. Digit can run for hours compared to conventional bipedal robots that burn through their batteries far quicker.
If you look closely at Digit’s structure, you’ll notice a brilliant bit of engineering: the knee actuator isn’t mounted at the knee itself. Instead, it’s smartly positioned near the hip joint, and motion is transmitted through a series of linkages. This clever relocation keeps the heavy actuator mass closer to the robot’s center of gravity, effectively reducing rotational inertia and improving both stability and energy efficiency.
Conclusion
Reinforcement learning can teach a robot to balance, walk, or even dance. But no amount of training can compensate for an inefficient mechanical design.
If a robot’s limbs are built with poor inertia profiles, its learned movements will always be energy-hungry, sluggish, or unstable no matter how good the control algorithm is.
Robotics isn’t just about teaching machines how to move, it’s about making sure they can move intelligently in the first place.
AI defines the mind of the robot,
but Inertia defines its soul.
It’s time to bring the conversation back to fundamentals to the quiet but powerful physics that truly govern motion. Because the next breakthrough in robotics won’t just come from smarter algorithms — it will come from smarter mechanics.
Reference
Demonstrating Rotational Inertia (or Moment of Inertia)
Moment of inertia by Walter Lewin
Angular Momentum Demo Arms IN vs OUT
(33) AP Moment of Inertia Lab – YouTube
agility-robotics ai bipedal-robotics control-systems energy-efficiency Hip Design humanoid-robots Humanoid Design Knee Design mass-moment-of-inertia mechanical-design physics robot-design robot-dynamics Robotics science technology

Leave a Reply